Miyashita I am solving an exercise in analytical mechanics. If you find any mistakes, please let us know.
Chapter 1
 In the motion of a pendulum with a length of $ l $, the angle $ \ phi $ is the only substantive variable. It is more convenient to express the position of the mass point in polar coordinates instead of Cartesian coordinates. By making good use of variables that take into account binding conditions in this way, it is possible to handle substantial variables of motion.
In the motion of a pendulum with a length of $ l $, the angle $ \ phi $ is the only substantive variable. It is more convenient to express the position of the mass point in polar coordinates instead of Cartesian coordinates. By making good use of variables that take into account binding conditions in this way, it is possible to handle substantial variables of motion.
Find the Lagrangian of the pendulum (Fig. 1.3) in Cartesian coordinates (x, y). (Example in Chapter 2 p.11)
Kinetic energy is $ T = 1 / 2m \ dot {x} ^ 2 + 1 / 2m \ dot {y} ^ 2 $, potential energy is $ U = mgy $
Therefore, Lagrangian
$L=\frac{m}{2}(\dot{x}^2+\dot{y}^2)-mgy$
Also, here are the binding conditions
x^2+y^2=l^2
There is.
Find the Lagrangian of the pendulum (Fig. 1.3) in polar coordinates (l, Φ). (Example in Chapter 2 p.12)
x=l\sin \phi
y=-l\cos \phi
Than
\dot{x}=\dot{l}\sin \phi + l\dot{\phi}\cos \phi
\dot{y}=-\dot{l}\cos \phi + l\dot{\phi}\sin \phi
Therefore
\frac{m}{2}(\dot{x}+\dot{y})^2=(\dot{l}\sin \phi + l\dot{\phi\}cos \phi)^2+(\dot{l}\sin \phi + l\dot{\phi}\cos \phi)^2=\frac{m}{2}(\dot{l}^2+l^2 \dot{\phi}^2)
U=mgl\cos \phi
Because $ l $ is constant
L=\frac{m}{2}(l^2 \dot{\phi}^2)+mgl\cos \phi
The polar coordinates handle the binding conditions well.
Equation of motion
Lagrange's equation of motion is
\frac{d}{dt}\frac{\partial L}{\partial \phi}=ml^2\ddot{\phi}
\frac{\partial L}{\partial \phi}=-mgl\sin \phi
\therefore
\ddot{\phi}=-\frac{g}{l}\sin \phi
Solving the equation of motion
Find the solution of minute vibration near Φ = 0.
When Taylor expands to the first
\dot{\phi}=\frac{p_φ}{ml^2}
\dot{p_\phi}=mgl\phi
Will be. Therefore
\ddot{\phi}=-\frac{g}{l}\phi
The general solution to this equation is
\phi=A\cos(\sqrt{\frac{g}{l}}t+B)
If $ \ phi = \ phi_0 << 1, \ \ dot {\ phi} = 0 $
A=\phi_0, \ \dot{\phi}=A\frac{g}{l}\sin(B)=0 \therefore B=0
Therefore,
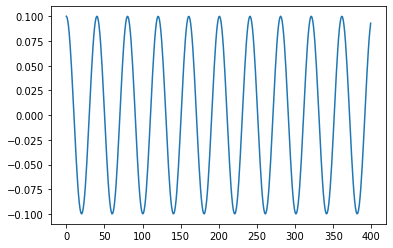
\phi=\phi_0 \cos(\sqrt{\frac{g}{l}}t)
Find the solution of the vibration with Φ0 as the initial value.
\ddot{\phi_1}=-\frac{g}{l}\sin(\phi_1)
Here $ \ phi_1 = \ phi + \ phi_0 $
The solution of this equation can be easily obtained by numerical analysis of Python.
The second-order differential equation needs to be the first-order differential equation.
\dot{\phi}=\omega
\dot{\omega}=-\frac{g}{l}\sin \phi
Python uses scipy.integrate.solve_ivp. This gives the integral of the ordinary differential equation with the initial value.
scipy.integrate.solve_ivp(fun, t_span, y0, method='RK45', t_eval=None, dense_output=False, events=None, vectorized=False, args=None, **options)
In
fun: function
t_span: range of integration
y0: initial value
method:'RK45 explicit runge-tack method
t_eval: Time to save the calculation result
Creating an animation
Micro vibration
%matplotlib inline
from numpy import sin, cos
from scipy.integrate import solve_ivp
from matplotlib.animation import FuncAnimation
import matplotlib.pyplot as plt
import numpy as np
g = 9.8 #Gravitational acceleration[m/s^2]
l = 1.0 #Pendulum length[m]
t_span = [0,20] #Observation time[s]
dt = 0.05 #interval[s]
t = np.arange(t_span[0], t_span[1], dt)
phi_0 = 0.1 #Initial angle[deg]
phi=phi_0*cos(np.sqrt(g/l)*t)
plt.plot(phi)
x = l * sin(phi)
y = -l * cos(phi)
fig, ax = plt.subplots()
line, = ax.plot([], [], 'o-', linewidth=2)
def animation(i):
thisx = [0, x[i]]
thisy = [0, y[i]]
line.set_data(thisx, thisy)
return line,
ani = FuncAnimation(fig, animation, frames=np.arange(0, len(t)), interval=25, blit=True)
ax.set_xlim(-l,l)
ax.set_ylim(-l,l)
ax.set_aspect('equal')
ax.grid()
ani.save('pendulum.gif', writer='pillow', fps=15)
plt.show()
vibration
g = 10 #Gravitational acceleration[m/s^2]
l = 1 #Pendulum length[m]
def models(t, state):#Equation of motion
dy = np.zeros_like(state)
dy[0] = state[1]
dy[1] = -(g/l)*sin(state[0])
return dy
t_span = [0,20] #Observation time[s]
dt = 0.05 #interval[s]
t = np.arange(t_span[0], t_span[1], dt)
phi_0 = 90.0 #Initial angle[deg]
omega_0 = 0.0 #Initial angular velocity[deg/s]
state = np.radians([phi_0, omega_0]) #initial state
results = solve_ivp(models, t_span, state, t_eval=t)
phi = results.y[0,:]
plt.plot(phi)
x = l * sin(phi)
y = -l * cos(phi)
fig, ax = plt.subplots()
line, = ax.plot([], [], 'o-', linewidth=2) #Draw by assigning coordinates to this line one after another
def animation(i):
thisx = [0, x[i]]
thisy = [0, y[i]]
line.set_data(thisx, thisy)
return line,
ani = FuncAnimation(fig, animation, frames=np.arange(0, len(t)), interval=25, blit=True)
ax.set_xlim(-l,l)
ax.set_ylim(-l,l)
ax.set_aspect('equal')
ax.grid()
plt.show()
ani.save('pendulum.gif', writer='pillow', fps=15)

Chapter 2
 Assuming that the coordinates of the mass points are ($ x_1, y_1 ) and ( x_2, y_2 $), respectively, the kinetic energy of this system is
Assuming that the coordinates of the mass points are ($ x_1, y_1 ) and ( x_2, y_2 $), respectively, the kinetic energy of this system is
T=\frac{m_1}{2}(\dot{x_1}^2+\dot{y_1}^2)+\frac{m_2}{2}(\dot{x_2}^2+\dot{y_2}^2)
Potential energy
U=m_1gy_1+m_2gy_2
Also, the binding conditions are
x_1^2+y_1^2=l_1^2,
(x_2-x_1)^2+(y_2-y_1)^2=l_2^2
Is. To solve the equation of motion for Lagrangian, it is necessary to use Lagrange's undetermined constant. Therefore, we will use polar coordinates in this case as well.
x_1=l_1\sin \theta_1
y_1=l_1\cos \theta_1
x_2=l_1\sin \theta_1+l_2\sin \theta_2
y_2=l_1\cos \theta_1+l_2\cos \theta_2
Since $ l_1 and \ l_2 $ are constant, each is time-differentiated.
\dot{x_1}=l_1\dot{\theta_1}\cos \theta_1
\dot{y_1}=-l_1\dot{\theta_1}\sin \theta_1
\dot{x_2}=l_1\dot{\theta_1}\cos \theta_1+l_2\dot{\theta_2}\cos \theta_2
\dot{y_2}=-l_1\dot{\theta_1}\sin \theta_1-l_2\dot{\theta_2}\sin \theta_2
Kinetic energy
T_1=\frac{m_1}{2}l_1^2\dot{\theta_1}^2(\sin^2\theta_1+\cos^2\\theta_1)=\frac{m_1}{2}l_1^2\dot{\theta_1}^2
T_2=\frac{m_2}{2}[(l_1\dot{\theta_1}\sin\theta_1 +l_2\dot{\theta_2}\sin\theta_2 )^2+(-l_1\dot{\theta_1}\cos\theta_1-l_2\dot{\theta_2}\cos\theta_2 )^2]
\ =\frac{m_2}{2}(l_1^2\dot{\theta_1}^2\sin^2\theta_1+2l_1l_2\dot{\theta_1}\dot{\theta_2}\sin\theta_1\sin\theta_2+l_1^2\dot{\theta_2}^2\sin^2\theta_2+l_1^2\dot{\theta_1}^2\cos^2\theta_1+2l_1l_2\dot{\theta_1}\dot{\theta_2}\cos\theta_1\cos\theta_2+l_1^2\dot{\theta_2}\cos^2\theta_2)
\ =\frac{m_2}{2}
(l_1^2\dot{\theta_1}^2+2l_1l_2\dot{\theta_1}\dot{\theta_2}\cos(\theta_1-\theta_2)+l_1^2\dot{\theta_2}^2)
T=T_1+T_2=\frac{m_1+m_2}{2}l_1^2\dot{\theta_1}^2+\frac{m_2}{2}(2l_1l_2\dot{\theta_1}\dot{\theta_2}\cos(\theta_1-\theta_2)+l_1^2\dot{\theta_2}^2)
Potential energy
U_1=-m_1gl_1\cos\theta_1
U_2=-m_2g(l_1\cos\theta_1+l_2\cos\theta_2)
U=U_1+U_2=-(m_1+m_2)gl_1\cos\theta_1-m_2gl_2\cos\theta_2
Therefore, Lagrangian
L=T-U=\frac{m_1+m_2}{2}l_1^2\dot{\theta_1}^2+\frac{m_2}{2}(2l_1l_2\dot{\theta_1}\dot{\theta_2}\cos(\theta_1-\theta_2)+l_2^2\dot{\theta_2}^2)+(m_1+m_2)gl_1\cos\theta_1+m_2gl_2\cos\theta_2
To find Euler-Lagrangian's equation of motion
\frac{\partial L}{\partial \theta_1}=-m_2l_1l_2\dot{\theta_1}\dot{\theta_2}\sin(\theta_1-\theta_2)+(m_1+m_2)gl_1\sin\theta_1
\frac{d}{dt}\frac{\partial L}{\partial \dot{\theta_1}}=\frac{d}{dt}[(m_1+m_2)l_1^2\dot{\theta_1}+m_2l_1l_2\dot{\theta_2}\cos(\theta_1-\theta_2)]
\ = (m_1+m_2)l_1^2\ddot{\theta_1}+m_2l_1l_2\ddot{\theta_2}\cos(\theta_1-\theta_2)
\frac{\partial L}{\partial \theta_2}=m_2l_1l_2\dot{\theta_1}\dot{\theta_2}\sin(\theta_1-\theta_2)-m_2gl_2\sin\theta_2
\frac{d}{dt}\frac{\partial L}{\partial \dot{\theta_2}}=\frac{d}{dt}[m_2l_1l_2\dot{\theta_1}\cos(\theta_1-\theta_2)+m_2l_2^2\dot{\theta_2})]
\ = m_2l_1l_2\ddot{\theta_1}\cos(\theta_1-\theta_2)+m_2l_2^2\ddot{\theta_2}
\therefore
m_2l_1l_2\dot{\theta_1}\dot{\theta_2}\sin(\theta_1-\theta_2)-(m_1+m_2)gl_1\sin\theta_1 = (m_1+m_2)l_1^2\ddot{\theta_1}+m_2l_1l_2\ddot{\theta_2}\cos(\theta_1-\theta_2)
m_2l_1l_2\dot{\theta_1}\dot{\theta_2}\sin(\theta_1-\theta_2)-m_2gl_2\sin\theta_2= m_2l_1l_2\ddot{\theta_1}\cos(\theta_1-\theta_2)-m_2l_2^2\ddot{\theta_2}
Exercises p.20-21
 (1)
Since the force applied to the object A is $ (kx) $, the potential energy $ U = -kx ^ 2 $, the kinetic energy $ T = \ frac {1} {2} m \ dot {x} ^ 2 $
Force applied to object B $ kmg $, $ U = Mgx $, kinetic energy $ T = \ frac {1} {2} M \ dot {x} ^ 2 $
(1)
Since the force applied to the object A is $ (kx) $, the potential energy $ U = -kx ^ 2 $, the kinetic energy $ T = \ frac {1} {2} m \ dot {x} ^ 2 $
Force applied to object B $ kmg $, $ U = Mgx $, kinetic energy $ T = \ frac {1} {2} M \ dot {x} ^ 2 $
Therefore,
L=\frac{1}{2}(m+M)\dot{x}^2-\frac{1}{2}kx^2+Mgx
Next
$ \frac{\partial L}{\partial \dot{x}}=(m+M)\dot{x}$
$ \frac{d}{dt}\frac{\partial L}{\partial \dot{x}}=(m+M)\dot{x}$
$ \frac{\partial L}{\partial x}=-kx+Mg$
The more Lagrangian equation of motion is
((m+M)\ddot{x}=-kx+Mg or (m+M)\ddot{x_1}=kx_1 (1)
Where $ x_1 = -x + Mg / k $
Since the general solution of equation (1) is $ A \ sin (\ omega t + \ alpha) $
x_1=A \sin(\omega t + \alpha) (2)
\dot{x_1}=\omega A \cos(\omega t + \alpha) (3)
If $ t = 0 $
$ x = 0 $, so $ x_1 = -Mg / k $,
$ \ dot {x} = 0 $, so $ \ dot {x_1} = 0 $
x_1(0)=A \sin(\alpha)=-Mg/k
\dot{x_1(0)}=\omega A \cos( \alpha)=0
\ cos (\ alpha) = 0 $ for $ \ omega A \ cos (\ alpha) = 0
\therefore \alpha=90^o
x_1(0)=A\sin(90^O)=A=-\frac{Mg}{k},
\therefore A=-Mg/k
\frac{\partial x_1}{\partial t} = -\omega \frac{Mg}{k} \cos(\omega t + \alpha)
x_1=-\frac{Mg}{k} \sin(\omega t+90^o)
\frac{\partial x_1}{\partial t} = -\omega \frac{Mg}{k} \cos(\omega t + \alpha)
\frac{\partial \dot{x_1}}{\partial t^2} = -\omega^2 \frac{Mg}{k} \sin(\omega t + \alpha)=x_1\omega^2
\ddot{x_1}=-x_1 \omega^2
Therefore, from (1)
-\omega^2(m+M)x_1=-kx_1
\omega=\sqrt{\frac{k}{m+M}}
x=\frac{M}{k}g(1-\cos\sqrt{\frac{k}{m+M}}t)
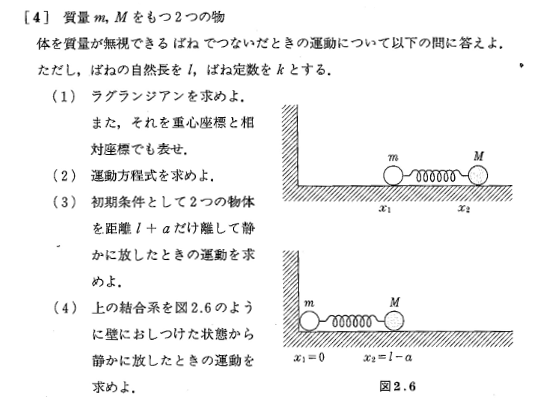
(1)
In relative coordinates
The force acting on the mass point
F=-kdx=k(l-x_2-x_1)
Potential energy
U=\frac{1}{2}k(l-x_2-x_1)^2
Kinetic energy
T=\frac{1}{2}m\dot{x_1}^2+\frac{1}{2}M\dot{x_2}^2
U=\frac{1}{2}k((l-x)^2
Will be. Therefore,
L=T-U=\frac{1}{2}m\dot{x_1}^2+\frac{1}{2}M\dot{x_2}^2-\frac{1}{2}k((l-x)^2
In barycentric coordinates
With $ X = \ frac {mx_1 + Mx_2} {m + M} $ as the center of gravity coordinates, $ x = x_2-x_1 $, $ \ dot {X} = \ frac {m \ dot {x_1} + M \ dot { x_2}} {m + M} $
\dot{X}^2=\frac{m^2\dot{x_1}^2+2mM\dot{x_1}\dot{x_2}+M^2\dot{x_2}^2}{(m+M)^2}
Because it becomes
T=\frac{1}{2}m\dot{x_1}^2+\frac{1}{2}M\dot{x_2}^2
\ \ =\frac{1}{2}(m+M)\dot{X}^2+\frac{1}{2}\frac{mM}{m+M}\dot{x}^2
Will be. Therefore
L=\frac{1}{2}(m+M)\dot{X}^2+\frac{1}{2}\frac{mM}{m+M}\dot{x}^2-\frac{1}{2}((l-x_2-x_1)^2
(2)
Lagrange's equation of motion is
$\frac{d}{dt}\frac{\partial L}{\partial \dot{x_i}} = \frac{\partial L}{\partial x_i} $
Because it is represented by
In relative coordinates
M\ddot{x_2}=k(l-x)
In barycentric coordinates
(M+m)\ddot{X}=0
\frac{mM}{m+M}\ddot{x}=k(l-x)
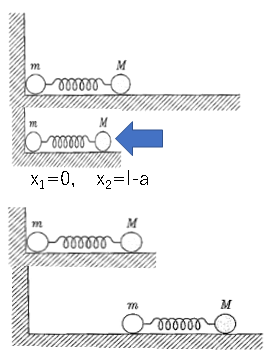
(3)
Separating two objects by the distance $ l + a $ means $ x_2-x_1-l = a $, so if you integrate $ (M + m) \ ddot {X} = 0 $ once
\dot{X}=C
If you integrate again
X=Ct+D
Therefore, it moves linearly with the passage of time.
Also,
$ \ frac {mM} {m + M} \ ddot {x} =-k ((l-x) $ to $ A sin (wt + \ alpha) $
If $ x_3 = x-l $, then $ x_3 (t) = A sin (wt + \ alpha) $
Therefore
\dot{x_3}(t)=-w A cos(wt+\alpha)
\ddot{x_3}(t)=-w^2 A sin(wt+\alpha)=-w^2 x_3
\frac{mM}{m+M}\ddot{x_3}=\frac{mM}{m+M}(-w^2 x_3)=-kx_3
Therefore,
$w^2=\frac{k(m+M)}{mM} $
therefore
$w=\sqrt{\frac{k(m+M)}{mM}} $
x_3=A sin (wt+\alpha)
When $ t = 0 $
$ x_3 (0) = A sin (\ alpha) = 1 $ Therefore $ A = a $
$ \ dot {x_3} (0) = w A cos (\ alpha) = 0 $ Therefore $ \ alpha = 90 ^ o $
Therefore
x_3=A sin (wt+90^o)=a cos(wt)=a cos(\sqrt{\frac{k(m+M)}{mM}}t)
\because
x=a cos(\sqrt{\frac{k(m+M)}{mM}}t)+l
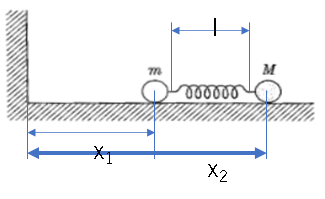
Until the mass points move away from the wall
In relative coordinates
$T=\frac{1}{2}M\dot{x_2}^2 $
U=\frac{1}{2}l(l-x_2)
Will be. Therefore
L=\frac{1}{2}M\dot{x_2}^2-\frac{1}{2}(l-x_2)
Lagrange's equation of motion is
M\ddot{x_2}=-k(x_2-l)
If $ x_3 = l-x_3 $
M\ddot{x_3}=kx_3
Therefore,
x_3(t)=A sin (wt+\alpha)
\dot{x_3}(t)=-wA cos (wt+\alpha)
\ddot{x_3}(t)=-w^2A sin (wt+\alpha)=-w^2 x_3
M \ddot{x_3}=M(-w^2x_3)=-kx_3
\because \ w=\sqrt{\frac{k}{M}}
When $ t = t_0 $
$ A sin (w t_0 + \ alpha) = a $ then $ A = a $ And $ \ alpha = \ pi / 2 $
Therefore,
w t_0 +\alpha=\pi \because t_0=\frac{\pi}{2}\sqrt{\frac{M}{k}}
After $ t_0 $, the exercise is calculated in (2). However, replace it with $ t = t-t_0 $.
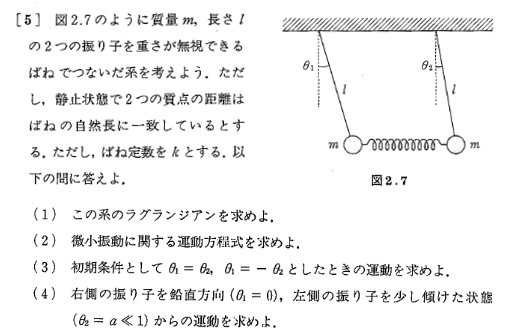
(1)
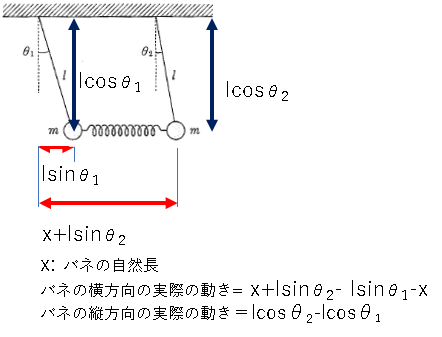
Position of mass points along the x-axis:
x_1=l \cdot sin \theta_1
x_2=x+l \cdot sin \theta_2
Position of mass points in the y-axis direction:
y_1=l \cdot cos \theta_1
y_2=l \cdot cos \theta_2
Therefore, the first-order time derivative is
\dot{x_1}=-l \cdot cos \theta_1 \dot{\theta_1}
\dot{x_2}=-l \cdot cos \theta_2 \dot{\theta_2}
\dot{y_1}=l \cdot sin \theta_1 \dot{\theta_1}
\dot{y_2}=l \cdot sin \theta_2 \dot{\theta_2}
Therefore, the kinetic energy is
$ \frac{1}{2}m(\dot{x_1}^2+\dot{x_2}^2+\dot{y_1}^2+\dot{y_2}^2)=$
$ \frac{1}{2}ml^2(\cdot cos^2 \theta_1 \dot{\theta_1}^2+\cdot cos^2 \theta_2 \dot{\theta_2}^2+
\cdot sin^2 \theta_1 \dot{\theta_1}^2+\cdot sin^2 \theta_2^2 \dot{\theta_2}^2)=
\frac{1}{2}ml^2 (\dot{\theta_1}^2+\dot{\theta_2}^2)$
The potential energy of the spring
U_1=\frac{1}{2}k(x_2-x_1)^2+(y_2-y_1)^2=\frac{1}{2}kl^2[(sin \theta_2-sin \theta_1)^2+(cos \theta_2-cos \theta_1)^2]
Potential energy
U_2=mg(y_1+y_2)=mgl(cos \theta_1+ cos \theta_2)
Therefore, Lagrangian
L=\frac{1}{2}ml^2(\dot{\theta_1}^2+\dot{\theta_2}^2)+mgl(cos \theta_1+ cos \theta_2)-\frac{1}{2}kl^2[(sin \theta_2-sin \theta_1)^2+(cos \theta_2-cos \theta_1)^2]
(2)
Since it is a minute vibration, if $ \ theta_1 <1, \ \ theta_2 <1, \ omega_g ^ 2 = g / l, \ omega_k ^ 2 = k / m $, it can be approximated as $ sin \ theta = \ theta $. From
The potential energy of the spring
U_1=\frac{1}{2}kl^2(\theta_2-\theta_1)^2
Also,
\frac{d}{dt}\frac{\partial L}{\partial \dot{\theta_1}}=ml\ddot{\theta_1}
\frac{d}{dt}\frac{\partial L}{\partial \dot{\theta_2}}=ml\ddot{\theta_2}
\frac{\partial U_1}{\partial \theta_1}=-kl^2(\theta_2-\theta_1)
\frac{\partial U_1}{\partial \theta_2}=kl^2(\theta_2-\theta_1)
\frac{\partial U_2}{\partial \theta_1}=-mgl sin\theta_1=-mgl\theta_1
\frac{\partial U_2}{\partial \theta_1}=-mgl sin \theta_2=-mgl\theta_2
Therefore,
\ddot{\theta_1}=\omega_g^2\theta_1-2\omega_k^2(\theta_2-\theta_1)
\ddot{\theta_2}=\omega_g^2\theta_2+2\omega_k^2(\theta_2-\theta_1)
(3)
If the initial value is $ \ theta_1 = \ theta_2 $, the two mass points move in the same direction, so add the above formulas together.
\ddot{\theta_1}+\ddot{\theta_2}=-\omega_g^2(\theta_1+\theta_2)
Therefore, the angular frequency is $ \ omega = \ omega_g $
If the initial value is $ \ theta_1 =-\ theta_2 $, the two mass points move in opposite directions, so the difference between the above equations is
\ddot{\theta_1}-\ddot{\theta_2}=-\omega_g^2(\theta_1-\theta_2)-2\omega_k^2(\theta_1-\theta_2)
Therefore, the angular frequency is $ \ omega = \ sqrt {\ omega_g ^ 2 + 2 \ omega_k ^ 2} $
Will be.
(4)
Since the initial value is $ \ theta_1 = 0, \ \ theta_2 = a $, the sum of the spring angles maintains $ a $, so $ \ theta_1 + \ theta_2 = a $, and the angle difference is
Keep $ \ theta_1- \ theta_2 = -a $.