BigTransfer (BiT) Fine Tuning
--Official blog https://blog.tensorflow.org/2020/05/bigtransfer-bit-state-of-art-transfer-learning-computer-vision.html
--Official sample code (TF2, PyTorch, JAX) https://github.com/google-research/big_transfer/tree/master/colabs
From here, the information necessary for BiT fine tuning (the part I used / examined when I played) is extracted and summarized in Japanese.
Text
-** URL where you can refer to and get the pre-trained model ** The h5 and npz formats are stored in the Cloud bucket. It can be used other than TF.
- TensorFlow Hub
https://tfhub.dev/google/collections/bit/1 - Cloud bucket
https://storage.googleapis.com/bit_models/
--The meaning of ** S, M, L ** attached to the BiT model ⇒ Differences in trained data sets. ** L ** is private.
| Model name | data set |
|---|---|
| BiT-S | ILSVRC-2012 (1.3M images) |
| BiT-M | ImageNet-21k (14M images) |
| BiT-L | JFT (300M images) |
--The meaning of ** R- ?? x? ** on the BiT model The BiT model uses ResNet, so the information there. --How to read R50x3 → 50 layers of ResNet, the width of each layer is 3 times the normal width. --Number of parameters Shows the approximate number of parameters that the model published on TFHub (excluding the output layer) has.
| ResNet | Number of parameters (approximate number) |
|---|---|
| R50x1 | 23M |
| R101x1 | 42M |
| R50x3 | 211M |
| R101x3 | 381M |
| R152x4 | 928M |
The following code confirms the number of parameters.
import tensorflow as tf
import tensorflow_hub as tfhub
model = tfhub.KerasLayer('https://tfhub.dev/google/bit/s-r50x1/1')
print(sum(tf.math.reduce_prod(w.shape).numpy() for w in model.weights))
BiT-HyperRule
A heuristic method provided for fine tuning BiT. "If you use this, you will feel good in one shot."
Of course, hyper-parameter search may give you a better model. It is worth the cost.
Depends on the image size of the dataset → Resize, crop size
The image size of the dataset is resized and randomly cropped to the specified size.
The correspondence table is quoted from the official blog Table1.
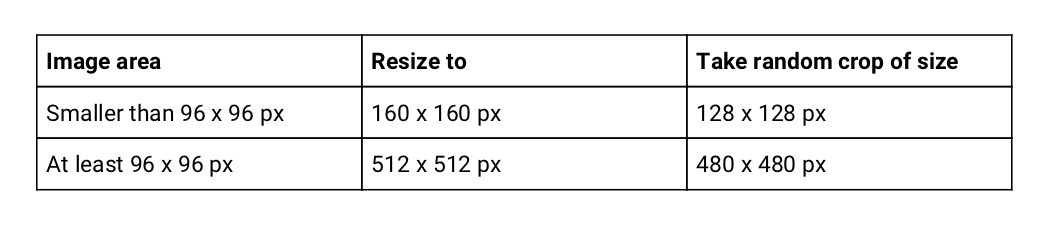 At the same time, randomly flip left and right. You only need to resize the validation data.
At the same time, randomly flip left and right. You only need to resize the validation data.
I wonder if TF2 will have such an atmosphere.
def augmentation(image, label):
image = tf.cast(image, tf.float32) / 255.0
image = tf.image.resize(image, [512, 512], method=tf.image.ResizeMethod.BILINEAR)
image = tf.image.random_flip_left_right(image)
image = tf.image.random_crop(image, [480, 480, 3])
return image, label
ds_train: tf.data.Dataset
ds_train = (ds_train
.shuffle(1024)
.repeat()
.map(augmentation, tf.data.experimental.AUTOTUNE)
.batch(64)
.prefetch(tf.data.experimental.AUTOTUNE))
Note
――I think the image size may be sparse ... ――I read the public source code, but it was resized uniformly, so you don't have to worry about it. ――If you are worried about only a part, filter it out. (I tried removing it in the bonus sample)
--Data expansion that is not performed depending on the task because it will be different from the correct label. --Counting of objects ⇒ Random crop is NG --Specify the position of the object ⇒ Random flip is NG
Depends on the number of dataset samples → Number of learning steps, Mix-Up
Quoted from the official blog Table 2.
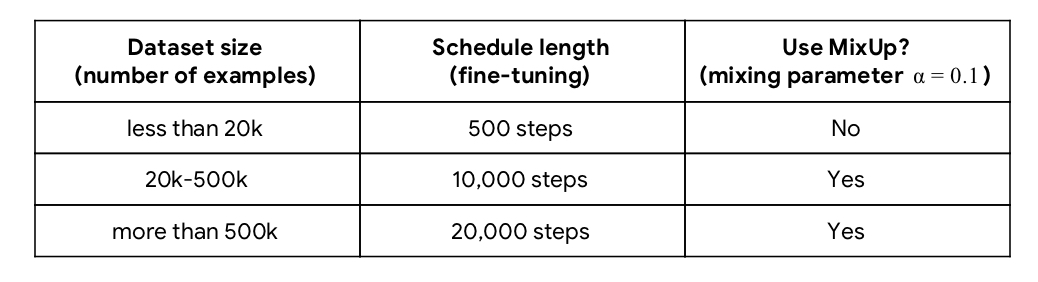
boundaries is used for subsequent learning rate scheduling.
if dataset_size < 20 * 10 ** 3:
schedule_len, boundaries = 500, [200, 300, 400]
elif 20 * 10 ** 3 <= dataset_size < 500 * 10 ** 3:
schedule_len, boundaries = 10000, [3000, 6000, 9000]
else:
schedule_len, boundaries = 20000, [6000, 12000, 18000]
How to MixUp
Reference: https://github.com/google-research/big_transfer/blob/master/input_pipeline_tf2_or_jax.py#L118
import tensorflow_probability as tfp
def mixup(image, label):
beta_dist = tfp.distributions.Beta(0.1, 0.1) # alpha=0.1
beta = tf.cast(beta_dist.sample([]), tf.float32)
image = (beta * image + (1 - beta) * tf.reverse(image, axis=[0]))
label = (beta * label + (1 - beta) * tf.reverse(label, axis=[0]))
return image, label
Change the arguments as appropriate. For this function, the timing to adapt to the dataset is ** after the mini-batch batch () **.
Since MixUp is involved, the label should be a One-Hot vector.
By the way, the above code is mixed up by tf.reverse with a set of data located symmetrically from the center in the batch.
Below is an example of 16 batches. It is mixed up in the upper left [0] and the lower right [15].

Batch size = 512
If memory is not possible, you can lower it.
In the TF2 sample code, the learning rate and the number of steps are adjusted according to the batch size. ・ ・ But it is not done in other samples. I haven't changed the number of steps when changing the learning rate, but I'm not sure why.
batch_size = 64
schedule_len = schedule_len * 512 / batch_size
lr = 0.003 * batch_size / 512
Optimization algorithm = SGD
- Learning rate: 0.003
- Momentum: 0.9
The learning rate is the initial value. The following scheduling is performed to change the learning rate during learning.
Learning rate scheduling
When the learning progress reaches 30%, 60%, 90% of the total, the learning rate is attenuated by $ \ frac {1} {10} $.
In the official sample code, it is not strictly separated by 30%, 60%, 90%. For example, when the number of samples is less than 20k, it becomes 0.003 up to 200 steps and 0.0003 between 201 and 300 steps.
lr_schedule = tf.keras.optimizers.schedules.PiecewiseConstantDecay(
boundaries=boundaries, values=[lr, lr * 1e-1, lr * 1e-2, lr * 1e-3])
optimizer = tf.keras.optimizers.SGD(learning_rate=lr_schedule, momentum=0.9)
- In the TF2 sample code, not every
values = [lr, lr * 0.1, lr * 0.001, lr * 0.0001]and $ \ frac {1} {10} $. In the PyTorch version, it is gradually attenuated. I don't know if it's a typo or a typo.
bonus
Jupyter Notebook when playing with Cats vs Dogs fine-tuned with reference to the sample code.