Utiliser le fichier d'étalonnage de la caméra avec OpenCvSharp4
introduction
Bonsoir J'ai calibré la caméra WEB en utilisant OpenCvSharp4, je vais donc la laisser en mémoire. Je ne comprends toujours pas la théorie et le raisonnement de l'étalonnage lui-même, donc le code a simplement fonctionné. .. ..
environnement
Caméra WEB: FullHD 1080P (caméra 2 millions de pixels) Création du fichier de calibrage: python (python-opencv) Calcul de la distorsion de l'objectif de l'appareil photo: C # (opencvsharp4.windows)
Création d'un fichier yaml d'étalonnage de caméra avec python
Je voulais vraiment faire des calculs d'étalonnage avec Opencvsharp Il est difficile de détourner les échantillons des 3 séries, et il était peu probable que je puisse rivaliser avec les 4 séries à mon niveau, donc je vais calmement calculer avec python avec des échantillons.
Alors, créez et exécutez le code suivant en vous référant à here. La majeure partie de la partie principale est une copie. .. .. Non, je l'apprécie vraiment.
CalcCalibration.py
import os
import sys
import numpy as np
import cv2
from time import sleep
from datetime import datetime
FILE_NAME = "calib.yml"
#Nombre d'images de référence
REFERENCE_IMG = 40
#La taille d'un côté du carré[cm]
SQUARE_SIZE = 2.0
#Nombre de points d'intersection
PATTERN_SIZE = (8, 13)
def main():
"""
Fonction principale
:return:
"""
calc_camera() #Calculer la distorsion de la caméra
def calc_camera():
"""
Fonction pour calculer la distorsion de la caméra
:return:
"""
pattern_points = np.zeros((np.prod(PATTERN_SIZE), 3), np.float32) #Poitrine (X,Y,Z) Spécification des coordonnées(Z=0)
pattern_points[:, :2] = np.indices(PATTERN_SIZE).T.reshape(-1, 2)
pattern_points *= SQUARE_SIZE
obj_points = []
img_points = []
capture = cv2.VideoCapture(0)
#Spécifiez la résolution
#Réglez la largeur de l'image de la caméra sur 1920
capture.set(cv2.CAP_PROP_FRAME_WIDTH, 1920)
#Réglez la largeur verticale de l'image de la caméra sur 1080
capture.set(cv2.CAP_PROP_FRAME_HEIGHT, 1080)
while len(obj_points) < REFERENCE_IMG:
#Obtenir une image
ret, img = capture.read()
height = img.shape[0]
width = img.shape[1]
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
#Détecte les coins de l'échiquier
ret, corner = cv2.findChessboardCorners(gray, PATTERN_SIZE)
#S'il y a un coin
if ret:
print("detected coner!")
print(str(len(obj_points) + 1) + "/" + str(REFERENCE_IMG))
term = (cv2.TERM_CRITERIA_EPS + cv2.TERM_CRITERIA_COUNT, 30, 0.1)
cv2.cornerSubPix(gray, corner, (5, 5), (-1, -1), term)
img_points.append(corner.reshape(-1, 2)) #append, méthode: ajoute un objet factor à la fin de la liste
obj_points.append(pattern_points)
cv2.imshow('image', img)
#Attendez 200 ms car il est jugé à chaque fois. C'est ici pour être retardé
if cv2.waitKey(200) & 0xFF == ord('q'):
break
print("calculating camera parameter...")
#Calculer les paramètres internes
rms, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(obj_points, img_points, gray.shape[::-1], None, None)
#Afficher le résultat du calcul
print("RMS = ", rms)
print("mtx = \n", mtx)
print("dist = ", dist.ravel())
#Enregistrer dans yml
f = cv2.FileStorage(FILE_NAME, flags=1)
f.write('mtx', mtx)
f.write('dist', dist)
# f.write('translation', rvecs)
# f.write('distortion', tvecs)
f.release()
if __name__ == '__main__':
main()
Le nombre d'images de référence, la taille d'un côté du carré, le nombre de points d'intersection et les paramètres de résolution de la caméra Réglez en fonction de l'environnement. Cette fois, j'ai créé [ici](https://drive.google.com/file/d/1A56mjyobKN3cLkFkPgokO8qCoDXUdXIC/view?usp=sharing), je l'ai imprimé au format A4 et je l'ai utilisé sur un tableau en plastique. Étant donné qu'un côté du carré mesure 20 mm, il mesure 2,0 cm et les points d'intersection sont 8 dans la direction horizontale et 13 dans la direction verticale. Le calcul de la distorsion est effectué tout en se déplaçant uniformément comme indiqué dans ↓. 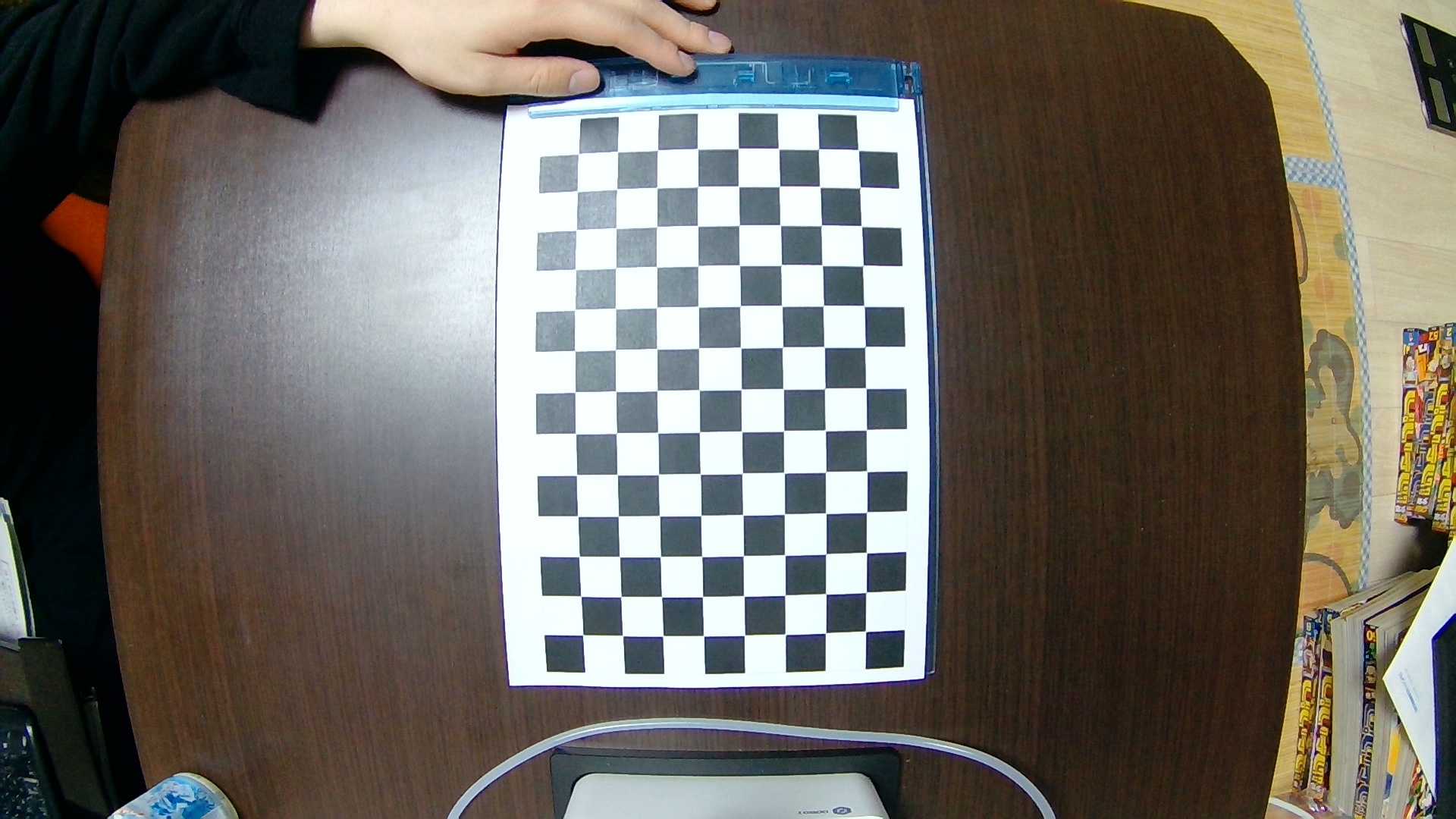  
Si les coins de 40 échiquiers peuvent être détectés, la distorsion sera calculée.
Vous pouvez vérifier le résultat comme indiqué ci-dessous. En même temps, vous pouvez voir que "calib.yml" est sorti.

calib.yml
%YAML:1.0
---
mtx: !!opencv-matrix
rows: 3
cols: 3
dt: d
data: [ 7.7958988893525259e+02, 0., 9.8266449367809537e+02, 0.,
7.7847873908657630e+02, 5.7636196300911377e+02, 0., 0., 1. ]
dist: !!opencv-matrix
rows: 1
cols: 5
dt: d
data: [ -1.8378651673412880e-01, 4.1014929211162864e-02,
-1.2046811513395908e-03, -4.8516056956278577e-04,
-4.8595996923656995e-03 ]
Lisez le fichier yaml avec OpenCvSharp4 et effectuez une correction de distorsion
Tout d'abord, installez opencvsharp. Pour une raison quelconque, OpenCvSharp4 sur la face supérieure a provoqué une erreur de chargement de DLL au moment de l'exécution. Installez OpenCvSharp4.WIndows.
 Une fois l'installation terminée, préparez "calib.yml" et une image pour vérification.
Exécutez le code ci-dessous.
Une fois l'installation terminée, préparez "calib.yml" et une image pour vérification.
Exécutez le code ci-dessous.
Program.cs
using System;
using System.Collections.Generic;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
using OpenCvSharp;
namespace CameraCalibrationSample
{
class Program
{
static void Main(string[] args)
{
const string ImagePath = @"./img/";
const string YamlFilePath = @"calib.yml";
// (1)Image d'étalonnage(Avant correction)Chargement
string[] imagePaths = System.IO.Directory.EnumerateFiles(ImagePath, "*", System.IO.SearchOption.AllDirectories).ToArray();
int imageNum = imagePaths.Length;
Mat[] srcImg = new Mat[imageNum];
for (int i = 0; i < imageNum; i++)
{
srcImg[i] = Cv2.ImRead(imagePaths[i], ImreadModes.Color);
Mat src = Cv2.ImRead(imagePaths[i], ImreadModes.Color);
//Lire le fichier yml et obtenir les paramètres de calcul
using (var fs = new FileStorage(YamlFilePath, FileStorage.Mode.Read))
{
var mtx = fs["mtx"].ReadMat();
var dist = fs["dist"].ReadMat();
Mat calib = new Mat();
Cv2.Undistort(src, calib, mtx, dist);
Cv2.ImShow("src", srcImg[i]);
Cv2.ImShow("calib", calib);
OpenCvSharp.Cv2.WaitKey(0);
}
}
Cv2.DestroyAllWindows();
}
}
}
Si le calcul de la distorsion fonctionne bien, il ressemblera à ↓.
・ Avant correction

· Après correction

Vous pouvez voir que cela a été corrigé correctement. Tu l'as fait! (^ O ^)
À la fin
Il y a pas mal de différences dans le code entre la 3ème et la 4ème série, et même si j'essayais de réécrire l'échantillon de l'ancienne version avec 4, le seuil était élevé. .. .. Il existe des exemples de sources de C ++ et de python sur le site officiel de l'OpenCV original, mais il m'est assez difficile de les remplacer par C #. Cette fois, j'ai renoncé à écrire la partie calcul en C # et j'ai décidé de l'écrire en C # uniquement là où les paramètres de correction sont utilisés. Même ainsi, cela a pris beaucoup de temps car la façon d'écrire le stockage de fichiers était assez différente entre les séries 3 et 4. Si vous regardez Wiki correctement, vous pouvez le voir immédiatement, mais il a fallu beaucoup de temps pour le remarquer car je ne chassais que 3 échantillons de la série. J'aurais dû enquêter correctement.
Source de référence
Merci pour l'URL ci-dessus. https://qiita.com/ReoNagai/items/5da95dea149c66ddbbdd https://github.com/shimat/opencvsharp/wiki/FileStorage https://stackoverrun.com/ja/q/11850575 http://hima-tubusi.blogspot.com/2016/02/opencvsharp_3.html https://qiita.com/Kazuhito/items/cc6b8a0bd75cf9689bf9 https://www.learnopencv.com/camera-calibration-using-opencv/
Recommended Posts