Comment utiliser le wrapper Python PyRealsense de Realsense avec Jetson Nano
Qu'est-ce que PyRealsense (pyrealsense2)?
Un programme wrapper pour gérer la caméra Realsense d'Intel en Python. Avec Python, vous pouvez facilement obtenir des images Realsense et des informations de profondeur.
C'est très pratique lorsque vous souhaitez acquérir des informations de profondeur après avoir reconnu une image avec un apprentissage en profondeur à l'aide de Python avec Realsense.
Pour les PC X86, vous pouvez facilement l'installer avec pip install pyrealsense, mais Arm's Jetson Nano nécessite une certaine ingéniosité, je vais donc vous présenter brièvement la méthode de configuration et son utilisation.
Dans cet article, Realsense suppose D435.
Construire Librealsense à partir de la source
Pour utiliser PyRealsense avec Jetson Nano, vous devez créer le pilote Realsense, Librealsense, à partir des sources.
Installation des bibliothèques requises
Installez les bibliothèques requises.
$ sudo apt-get update
$ sudo apt-get install -y cmake
Remarque: je ne l'ai pas configuré à partir de zéro, alors j'ai peut-être besoin d'autres bibliothèques. Je l'ajouterai dès que cela deviendra clair.
Si vous souhaitez effectuer un apprentissage en profondeur, veuillez vous référer à l'article suivant.
Apprentissage en profondeur avec Jetson Nano
Construire et installer Librealsense
Téléchargez (git clone) Librealsense avec la commande suivante, compilez-le et installez-le.
$ cd && git clone https://github.com/IntelRealSense/librealsense.git
$ cd librealsense
$ mkdir build
$ cd build
$ cmake ../ -DBUILD_PYTHON_BINDINGS:bool=true
$ make -j4
$ sudo make install
Paramètres Udev
Utilisez la commande suivante pour configurer udev afin qu'il reconnaisse Realsense via USB.
$ cd ~/librealsense
$ ./scripts/setup_udev_rules.sh
Réglage du chemin
Ajoutez un chemin.
$ export PYTHONPATH=$PYTHONPATH:/usr/local/lib
Vous devez ajouter le pass à chaque fois. Si cela pose problème, ajoutez la commande ci-dessus à ~ / .bashrc.
Contrôle de fonctionnement
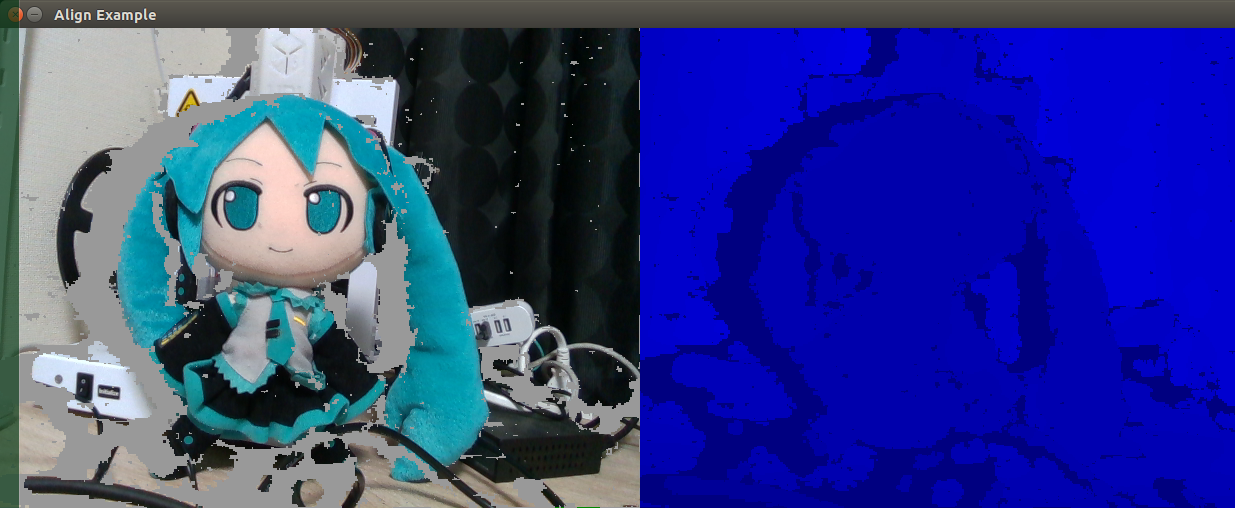
Exécutons l'exemple de programme.
$ cd ~/librealsense/wrappers/python/examples
$ python3 align-depth2color.py
J'ai pu obtenir des images couleur Realsense et des informations de profondeur en Python, comme indiqué ci-dessous.
Si vous regardez le code source, vous pouvez comprendre comment l'utiliser dans une certaine mesure. Le document est le suivant.
référence
- http://mirai-tec.hatenablog.com/entry/2018/03/29/000217
- https://github.com/IntelRealSense/librealsense/tree/master/wrappers/python
Article associé
Conseils relatifs à Jetson Nano
Comment utiliser Intel Realsense D435 avec Jetson Nano (compatible ROS)
Recommended Posts