Comparez DCGAN et pix2pix avec Keras
Vidéo
Generalization and Equilibrium in Generative Adversarial Nets (GANs)
torche7 pix2pix
torch7 est l'original http://qiita.com/masataka46/items/3d5a2b34d3d7fd29a6e3
DCGAN
Architecture DCGAN
https://www.slideshare.net/xavigiro/deep-learning-for-computer-vision-generative-models-and-adversarial-training-upc-2016
https://blog.openai.com/generative-models/
Générez une image par génération hostile. Bruit d'entrée et générer une fausse image avec le générateur. Le discriminateur détermine l'image réelle.


 Sortez la distribution de probabilité de l'image avec le générateur. Le discriminateur détermine s'il est authentique ou non.
Sortez la distribution de probabilité de l'image avec le générateur. Le discriminateur détermine s'il est authentique ou non.

Une explication facile à comprendre de la fonction de perte
eshare.net/hamadakoichi/laplacian-pyramid-of-generative-adversarial-networks-lapgan-nips2015-reading-nipsyomi

Implémentation de DCGAN avec keras Partie 1
La source https://github.com/jacobgil/keras-dcgan
Regardons la définition d'en haut. Générateur pour la génération
python
def generator_model():
model = Sequential()
model.add(Dense(input_dim=100, output_dim=1024))
model.add(Activation('tanh'))
model.add(Dense(128*7*7))
model.add(BatchNormalization())
model.add(Activation('tanh'))
model.add(Reshape((128, 7, 7), input_shape=(128*7*7,)))
model.add(UpSampling2D(size=(2, 2)))
model.add(Convolution2D(64, 5, 5, border_mode='same'))
model.add(Activation('tanh'))
model.add(UpSampling2D(size=(2, 2)))
model.add(Convolution2D(1, 5, 5, border_mode='same'))
model.add(Activation('tanh'))
return model
Discriminateur pour le jugement
python
def discriminator_model():
model = Sequential()
model.add(Convolution2D(
64, 5, 5,
border_mode='same',
input_shape=(1, 28, 28)))
model.add(Activation('tanh'))
model.add(MaxPooling2D(pool_size=(2, 2)))
model.add(Convolution2D(128, 5, 5))
model.add(Activation('tanh'))
model.add(MaxPooling2D(pool_size=(2, 2)))
model.add(Flatten())
model.add(Dense(1024))
model.add(Activation('tanh'))
model.add(Dense(1))
model.add(Activation('sigmoid'))
return model
Un modèle qui relie un générateur et un discriminateur Utilisé lors de la propagation des erreurs.
python
def generator_containing_discriminator(generator, discriminator):
model = Sequential()
model.add(generator)
discriminator.trainable = False
model.add(discriminator)
return model
Une fonction qui enregistre les résultats de sortie dans une image.
python
def combine_images(generated_images):
num = generated_images.shape[0]
width = int(math.sqrt(num))
height = int(math.ceil(float(num)/width))
shape = generated_images.shape[2:]
image = np.zeros((height*shape[0], width*shape[1]),
dtype=generated_images.dtype)
for index, img in enumerate(generated_images):
i = int(index/width)
j = index % width
image[i*shape[0]:(i+1)*shape[0], j*shape[1]:(j+1)*shape[1]] = \
img[0, :, :]
return image
Définition de l'apprentissage. Obtenez des données mnist. Normalisez l'image et remettez-la dans X_train. Définissez un modèle qui combine le générateur et le discriminateur. SGD définit une fonction d'optimisation pour un modèle qui combine un générateur et un discriminateur. Créez du bruit pour la taille du lot.
Bruit d'entrée au générateur. generated_images = generator.predict(noise, verbose=0) Combinez l'image d'origine et l'image de sortie pour créer X. X = np.concatenate((image_batch, generated_images)) Entrez X et y dans le discriminateur pour apprendre et générer une erreur. d_loss = discriminator.train_on_batch(X, y) Apprenez un modèle qui combine deux modèles et génère une erreur. g_loss = discriminator_on_generator.train_on_batch(noise, [1] * BATCH_SIZE)
python
def train(BATCH_SIZE):
(X_train, y_train), (X_test, y_test) = mnist.load_data()
X_train = (X_train.astype(np.float32) - 127.5)/127.5
X_train = X_train.reshape((X_train.shape[0], 1) + X_train.shape[1:])
discriminator = discriminator_model()
generator = generator_model()
discriminator_on_generator = \
generator_containing_discriminator(generator, discriminator)
d_optim = SGD(lr=0.0005, momentum=0.9, nesterov=True)
g_optim = SGD(lr=0.0005, momentum=0.9, nesterov=True)
generator.compile(loss='binary_crossentropy', optimizer="SGD")
discriminator_on_generator.compile(
loss='binary_crossentropy', optimizer=g_optim)
discriminator.trainable = True
discriminator.compile(loss='binary_crossentropy', optimizer=d_optim)
noise = np.zeros((BATCH_SIZE, 100))
for epoch in range(100):
print("Epoch is", epoch)
print("Number of batches", int(X_train.shape[0]/BATCH_SIZE))
for index in range(int(X_train.shape[0]/BATCH_SIZE)):
for i in range(BATCH_SIZE):
noise[i, :] = np.random.uniform(-1, 1, 100)
image_batch = X_train[index*BATCH_SIZE:(index+1)*BATCH_SIZE]
generated_images = generator.predict(noise, verbose=0)
if index % 20 == 0:
image = combine_images(generated_images)
image = image*127.5+127.5
Image.fromarray(image.astype(np.uint8)).save(
str(epoch)+"_"+str(index)+".png ")
X = np.concatenate((image_batch, generated_images))
y = [1] * BATCH_SIZE + [0] * BATCH_SIZE
d_loss = discriminator.train_on_batch(X, y)
print("batch %d d_loss : %f" % (index, d_loss))
for i in range(BATCH_SIZE):
noise[i, :] = np.random.uniform(-1, 1, 100)
discriminator.trainable = False
g_loss = discriminator_on_generator.train_on_batch(
noise, [1] * BATCH_SIZE)
discriminator.trainable = True
print("batch %d g_loss : %f" % (index, g_loss))
if index % 10 == 9:
generator.save_weights('generator', True)
discriminator.save_weights('discriminator', True)
Définition de la pièce générée. Save_weights est effectué au moment de l'apprentissage, donc load_weights. Nice est False lorsqu'il est exécuté par défaut. Si nice est spécifié, les images avec de bonnes estimations seront triées et enregistrées ensemble.
python
def generate(BATCH_SIZE, nice=False):
generator = generator_model()
generator.compile(loss='binary_crossentropy', optimizer="SGD")
generator.load_weights('generator')
if nice:
discriminator = discriminator_model()
discriminator.compile(loss='binary_crossentropy', optimizer="SGD")
discriminator.load_weights('discriminator')
noise = np.zeros((BATCH_SIZE*20, 100))
for i in range(BATCH_SIZE*20):
noise[i, :] = np.random.uniform(-1, 1, 100)
generated_images = generator.predict(noise, verbose=1)
d_pret = discriminator.predict(generated_images, verbose=1)
index = np.arange(0, BATCH_SIZE*20)
index.resize((BATCH_SIZE*20, 1))
pre_with_index = list(np.append(d_pret, index, axis=1))
pre_with_index.sort(key=lambda x: x[0], reverse=True)
nice_images = np.zeros((BATCH_SIZE, 1) +
(generated_images.shape[2:]), dtype=np.float32)
for i in range(int(BATCH_SIZE)):
idx = int(pre_with_index[i][1])
nice_images[i, 0, :, :] = generated_images[idx, 0, :, :]
image = combine_images(nice_images)
else:
noise = np.zeros((BATCH_SIZE, 100))
for i in range(BATCH_SIZE):
noise[i, :] = np.random.uniform(-1, 1, 100)
generated_images = generator.predict(noise, verbose=1)
image = combine_images(generated_images)
image = image*127.5+127.5
Image.fromarray(image.astype(np.uint8)).save(
"generated_image.png ")
Définition d'argument.
python
def get_args():
parser = argparse.ArgumentParser()
parser.add_argument("--mode", type=str)
parser.add_argument("--batch_size", type=int, default=128)
parser.add_argument("--nice", dest="nice", action="store_true")
parser.set_defaults(nice=False)
args = parser.parse_args()
return args
Exécuter. Entraînez-vous en apprenant. Générer pour estimation.
python
if __name__ == "__main__":
args = get_args()
if args.mode == "train":
train(BATCH_SIZE=args.batch_size)
elif args.mode == "generate":
generate(BATCH_SIZE=args.batch_size, nice=args.nice)
Contact GitHub API Training Shop Blog About
Implémentation de DCGAN dans keras Partie 2
C'est juste un peu différent. La source https://github.com/tdeboissiere/DeepLearningImplementations/tree/master/GAN
Dans ce code, le codage est tel que les données d'image sont une fois converties en HDF5 puis apprises.
//conversion
python make_dataset.py --img_size 64
//Apprentissage
python main.py --img_dim 64
Seul le train dans train_GAN.py est appelé.
main.py
import os
import argparse
def launch_training(**kwargs):
# Launch training
train_GAN.train(**kwargs)
if __name__ == "__main__":
parser = argparse.ArgumentParser(description='Train model')
parser.add_argument('--backend', type=str, default="theano", help="theano or tensorflow")
parser.add_argument('--generator', type=str, default="upsampling", help="upsampling or deconv")
parser.add_argument('--dset', type=str, default="mnist", help="mnist or celebA")
parser.add_argument('--batch_size', default=32, type=int, help='Batch size')
parser.add_argument('--n_batch_per_epoch', default=200, type=int, help="Number of training epochs")
parser.add_argument('--nb_epoch', default=400, type=int, help="Number of batches per epoch")
parser.add_argument('--epoch', default=10, type=int, help="Epoch at which weights were saved for evaluation")
parser.add_argument('--nb_classes', default=2, type=int, help="Number of classes")
parser.add_argument('--do_plot', default=False, type=bool, help="Debugging plot")
parser.add_argument('--bn_mode', default=2, type=int, help="Batch norm mode")
parser.add_argument('--img_dim', default=64, type=int, help="Image width == height")
parser.add_argument('--noise_scale', default=0.5, type=float, help="variance of the normal from which we sample the noise")
parser.add_argument('--label_smoothing', action="store_true", help="smooth the positive labels when training D")
parser.add_argument('--use_mbd', action="store_true", help="use mini batch disc")
parser.add_argument('--label_flipping', default=0, type=float, help="Probability (0 to 1.) to flip the labels when training D")
args = parser.parse_args()
assert args.dset in ["mnist", "celebA"]
# Set the backend by modifying the env variable
if args.backend == "theano":
os.environ["KERAS_BACKEND"] = "theano"
elif args.backend == "tensorflow":
os.environ["KERAS_BACKEND"] = "tensorflow"
# Import the backend
import keras.backend as K
# manually set dim ordering otherwise it is not changed
if args.backend == "theano":
image_dim_ordering = "th"
K.set_image_dim_ordering(image_dim_ordering)
elif args.backend == "tensorflow":
image_dim_ordering = "tf"
K.set_image_dim_ordering(image_dim_ordering)
import train_GAN
# Set default params
d_params = {"mode": "train_GAN",
"dset": args.dset,
"generator": args.generator,
"batch_size": args.batch_size,
"n_batch_per_epoch": args.n_batch_per_epoch,
"nb_epoch": args.nb_epoch,
"model_name": "CNN",
"epoch": args.epoch,
"nb_classes": args.nb_classes,
"do_plot": args.do_plot,
"image_dim_ordering": image_dim_ordering,
"bn_mode": args.bn_mode,
"img_dim": args.img_dim,
"label_smoothing": args.label_smoothing,
"label_flipping": args.label_flipping,
"noise_scale": args.noise_scale,
"use_mbd": args.use_mbd,
}
# Launch training
launch_training(**d_params)
Puisque le modèle est appelé en train, regardons d'abord le modèle. Comme le suréchantillonnage est sélectionné par défaut, voir suréchantillonnage.
models_GAN.py
def generator_upsampling(noise_dim, img_dim, bn_mode, model_name="generator_upsampling", dset="mnist"):
"""
Generator model of the DCGAN
args : img_dim (tuple of int) num_chan, height, width
pretr_weights_file (str) file holding pre trained weights
returns : model (keras NN) the Neural Net model
"""
s = img_dim[1]
f = 512
if dset == "mnist":
start_dim = int(s / 4)
nb_upconv = 2
else:
start_dim = int(s / 16)
nb_upconv = 4
if K.image_dim_ordering() == "th":
bn_axis = 1
reshape_shape = (f, start_dim, start_dim)
output_channels = img_dim[0]
else:
reshape_shape = (start_dim, start_dim, f)
bn_axis = -1
output_channels = img_dim[-1]
gen_input = Input(shape=noise_dim, name="generator_input")
x = Dense(f * start_dim * start_dim, input_dim=noise_dim)(gen_input)
x = Reshape(reshape_shape)(x)
x = BatchNormalization(mode=bn_mode, axis=bn_axis)(x)
x = Activation("relu")(x)
# Upscaling blocks
for i in range(nb_upconv):
x = UpSampling2D(size=(2, 2))(x)
nb_filters = int(f / (2 ** (i + 1)))
x = Convolution2D(nb_filters, 3, 3, border_mode="same")(x)
x = BatchNormalization(mode=bn_mode, axis=1)(x)
x = Activation("relu")(x)
x = Convolution2D(nb_filters, 3, 3, border_mode="same")(x)
x = Activation("relu")(x)
x = Convolution2D(output_channels, 3, 3, name="gen_convolution2d_final", border_mode="same", activation='tanh')(x)
generator_model = Model(input=[gen_input], output=[x], name=model_name)
return generator_model
Discriminateur.
models_GAN.py
def DCGAN_discriminator(noise_dim, img_dim, bn_mode, model_name="DCGAN_discriminator", dset="mnist", use_mbd=False):
"""
Discriminator model of the DCGAN
args : img_dim (tuple of int) num_chan, height, width
pretr_weights_file (str) file holding pre trained weights
returns : model (keras NN) the Neural Net model
"""
if K.image_dim_ordering() == "th":
bn_axis = 1
else:
bn_axis = -1
disc_input = Input(shape=img_dim, name="discriminator_input")
if dset == "mnist":
list_f = [128]
else:
list_f = [64, 128, 256]
# First conv
x = Convolution2D(32, 3, 3, subsample=(2, 2), name="disc_convolution2d_1", border_mode="same")(disc_input)
x = BatchNormalization(mode=bn_mode, axis=bn_axis)(x)
x = LeakyReLU(0.2)(x)
# Next convs
for i, f in enumerate(list_f):
name = "disc_convolution2d_%s" % (i + 2)
x = Convolution2D(f, 3, 3, subsample=(2, 2), name=name, border_mode="same")(x)
x = BatchNormalization(mode=bn_mode, axis=bn_axis)(x)
x = LeakyReLU(0.2)(x)
x = Flatten()(x)
def minb_disc(x):
diffs = K.expand_dims(x, 3) - K.expand_dims(K.permute_dimensions(x, [1, 2, 0]), 0)
abs_diffs = K.sum(K.abs(diffs), 2)
x = K.sum(K.exp(-abs_diffs), 2)
return x
def lambda_output(input_shape):
return input_shape[:2]
num_kernels = 100
dim_per_kernel = 5
M = Dense(num_kernels * dim_per_kernel, bias=False, activation=None)
MBD = Lambda(minb_disc, output_shape=lambda_output)
if use_mbd:
x_mbd = M(x)
x_mbd = Reshape((num_kernels, dim_per_kernel))(x_mbd)
x_mbd = MBD(x_mbd)
x = merge([x, x_mbd], mode='concat')
x = Dense(2, activation='softmax', name="disc_dense_2")(x)
discriminator_model = Model(input=[disc_input], output=[x], name=model_name)
return discriminator_model
Les deux modèles ont été combinés.
models_GAN.py
def DCGAN(generator, discriminator_model, noise_dim, img_dim):
noise_input = Input(shape=noise_dim, name="noise_input")
generated_image = generator(noise_input)
DCGAN_output = discriminator_model(generated_image)
DCGAN = Model(input=[noise_input],
output=[DCGAN_output],
name="DCGAN")
return DCGAN
Il peut être appelé avec une charge.
models_GAN.py
def load(model_name, noise_dim, img_dim, bn_mode, batch_size, dset="mnist", use_mbd=False):
if model_name == "generator_upsampling":
model = generator_upsampling(noise_dim, img_dim, bn_mode, model_name=model_name, dset=dset)
print model.summary()
from keras.utils.visualize_util import plot
plot(model, to_file='../../figures/%s.png' % model_name, show_shapes=True, show_layer_names=True)
return model
if model_name == "generator_deconv":
model = generator_deconv(noise_dim, img_dim, bn_mode, batch_size, model_name=model_name, dset=dset)
print model.summary()
from keras.utils.visualize_util import plot
plot(model, to_file='../../figures/%s.png' % model_name, show_shapes=True, show_layer_names=True)
return model
if model_name == "DCGAN_discriminator":
model = DCGAN_discriminator(noise_dim, img_dim, bn_mode, model_name=model_name, dset=dset, use_mbd=use_mbd)
model.summary()
from keras.utils.visualize_util import plot
plot(model, to_file='../../figures/%s.png' % model_name, show_shapes=True, show_layer_names=True)
return model
Regardons l'apprentissage. train a été appelé depuis main.py, mais tout le traitement est écrit dans train. C'est presque la même chose que la mise en œuvre de la partie 1.
import models_GAN Apportez DCGAN à partir de modèles de modèles. Les deux modèles ont été combinés. DCGAN_model = models.DCGAN(generator_model, discriminator_model, noise_dim, img_dim) Apprenez les discriminateurs. disc_loss = discriminator_model.train_on_batch(X_disc, y_disc) Apprenez un modèle qui combine deux. gen_loss = DCGAN_model.train_on_batch(X_gen, y_gen)
train_GAN.py
def train(**kwargs):
"""
Train model
Load the whole train data in memory for faster operations
args: **kwargs (dict) keyword arguments that specify the model hyperparameters
"""
# Roll out the parameters
batch_size = kwargs["batch_size"]
n_batch_per_epoch = kwargs["n_batch_per_epoch"]
nb_epoch = kwargs["nb_epoch"]
generator = kwargs["generator"]
model_name = kwargs["model_name"]
image_dim_ordering = kwargs["image_dim_ordering"]
img_dim = kwargs["img_dim"]
bn_mode = kwargs["bn_mode"]
label_smoothing = kwargs["label_smoothing"]
label_flipping = kwargs["label_flipping"]
noise_scale = kwargs["noise_scale"]
dset = kwargs["dset"]
use_mbd = kwargs["use_mbd"]
epoch_size = n_batch_per_epoch * batch_size
# Setup environment (logging directory etc)
general_utils.setup_logging(model_name)
# Load and rescale data
if dset == "celebA":
X_real_train = data_utils.load_celebA(img_dim, image_dim_ordering)
if dset == "mnist":
X_real_train, _, _, _ = data_utils.load_mnist(image_dim_ordering)
img_dim = X_real_train.shape[-3:]
noise_dim = (100,)
try:
# Create optimizers
opt_dcgan = Adam(lr=1E-3, beta_1=0.5, beta_2=0.999, epsilon=1e-08)
opt_discriminator = SGD(lr=1E-3, momentum=0.9, nesterov=True)
# Load generator model
generator_model = models.load("generator_%s" % generator,
noise_dim,
img_dim,
bn_mode,
batch_size,
dset=dset,
use_mbd=use_mbd)
# Load discriminator model
discriminator_model = models.load("DCGAN_discriminator",
noise_dim,
img_dim,
bn_mode,
batch_size,
dset=dset,
use_mbd=use_mbd)
generator_model.compile(loss='mse', optimizer=opt_discriminator)
discriminator_model.trainable = False
DCGAN_model = models.DCGAN(generator_model,
discriminator_model,
noise_dim,
img_dim)
loss = ['binary_crossentropy']
loss_weights = [1]
DCGAN_model.compile(loss=loss, loss_weights=loss_weights, optimizer=opt_dcgan)
discriminator_model.trainable = True
discriminator_model.compile(loss='binary_crossentropy', optimizer=opt_discriminator)
gen_loss = 100
disc_loss = 100
# Start training
print("Start training")
for e in range(nb_epoch):
# Initialize progbar and batch counter
progbar = generic_utils.Progbar(epoch_size)
batch_counter = 1
start = time.time()
for X_real_batch in data_utils.gen_batch(X_real_train, batch_size):
# Create a batch to feed the discriminator model
X_disc, y_disc = data_utils.get_disc_batch(X_real_batch,
generator_model,
batch_counter,
batch_size,
noise_dim,
noise_scale=noise_scale,
label_smoothing=label_smoothing,
label_flipping=label_flipping)
# Update the discriminator
disc_loss = discriminator_model.train_on_batch(X_disc, y_disc)
# Create a batch to feed the generator model
X_gen, y_gen = data_utils.get_gen_batch(batch_size, noise_dim, noise_scale=noise_scale)
# Freeze the discriminator
discriminator_model.trainable = False
gen_loss = DCGAN_model.train_on_batch(X_gen, y_gen)
# Unfreeze the discriminator
discriminator_model.trainable = True
batch_counter += 1
progbar.add(batch_size, values=[("D logloss", disc_loss),
("G logloss", gen_loss)])
# Save images for visualization
if batch_counter % 100 == 0:
data_utils.plot_generated_batch(X_real_batch, generator_model,
batch_size, noise_dim, image_dim_ordering)
if batch_counter >= n_batch_per_epoch:
break
print("")
print('Epoch %s/%s, Time: %s' % (e + 1, nb_epoch, time.time() - start))
if e % 5 == 0:
gen_weights_path = os.path.join('../../models/%s/gen_weights_epoch%s.h5' % (model_name, e))
generator_model.save_weights(gen_weights_path, overwrite=True)
disc_weights_path = os.path.join('../../models/%s/disc_weights_epoch%s.h5' % (model_name, e))
discriminator_model.save_weights(disc_weights_path, overwrite=True)
DCGAN_weights_path = os.path.join('../../models/%s/DCGAN_weights_epoch%s.h5' % (model_name, e))
DCGAN_model.save_weights(DCGAN_weights_path, overwrite=True)
except KeyboardInterrupt:
pass
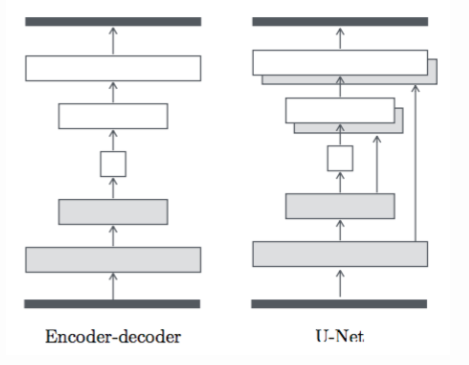
pix2pix
architecture pix2pix
Mettez une image dans le générateur au lieu du bruit. Faites du bruit en ajoutant des abandons pendant l'apprentissage et les tests.
Le générateur s'appelle u-net et l'encodeur / décodeur est ignoré et combiné.

implémentation pix2 pix dans keras
La source https://github.com/tdeboissiere/DeepLearningImplementations/tree/master/pix2pix
Il est écrit avec presque la même configuration que l'implémentation DCGAN # 2. main.py s'appelle train de train.py.
main.py
import os
import argparse
def launch_training(**kwargs):
# Launch training
train.train(**kwargs)
if __name__ == "__main__":
parser = argparse.ArgumentParser(description='Train model')
parser.add_argument('patch_size', type=int, nargs=2, action="store", help="Patch size for D")
parser.add_argument('--backend', type=str, default="theano", help="theano or tensorflow")
parser.add_argument('--generator', type=str, default="upsampling", help="upsampling or deconv")
parser.add_argument('--dset', type=str, default="facades", help="facades")
parser.add_argument('--batch_size', default=4, type=int, help='Batch size')
parser.add_argument('--n_batch_per_epoch', default=100, type=int, help="Number of training epochs")
parser.add_argument('--nb_epoch', default=400, type=int, help="Number of batches per epoch")
parser.add_argument('--epoch', default=10, type=int, help="Epoch at which weights were saved for evaluation")
parser.add_argument('--nb_classes', default=2, type=int, help="Number of classes")
parser.add_argument('--do_plot', action="store_true", help="Debugging plot")
parser.add_argument('--bn_mode', default=2, type=int, help="Batch norm mode")
parser.add_argument('--img_dim', default=64, type=int, help="Image width == height")
parser.add_argument('--use_mbd', action="store_true", help="Whether to use minibatch discrimination")
parser.add_argument('--use_label_smoothing', action="store_true", help="Whether to smooth the positive labels when training D")
parser.add_argument('--label_flipping', default=0, type=float, help="Probability (0 to 1.) to flip the labels when training D")
args = parser.parse_args()
# Set the backend by modifying the env variable
if args.backend == "theano":
os.environ["KERAS_BACKEND"] = "theano"
elif args.backend == "tensorflow":
os.environ["KERAS_BACKEND"] = "tensorflow"
# Import the backend
import keras.backend as K
# manually set dim ordering otherwise it is not changed
if args.backend == "theano":
image_dim_ordering = "th"
K.set_image_dim_ordering(image_dim_ordering)
elif args.backend == "tensorflow":
image_dim_ordering = "tf"
K.set_image_dim_ordering(image_dim_ordering)
import train
# Set default params
d_params = {"dset": args.dset,
"generator": args.generator,
"batch_size": args.batch_size,
"n_batch_per_epoch": args.n_batch_per_epoch,
"nb_epoch": args.nb_epoch,
"model_name": "CNN",
"epoch": args.epoch,
"nb_classes": args.nb_classes,
"do_plot": args.do_plot,
"image_dim_ordering": image_dim_ordering,
"bn_mode": args.bn_mode,
"img_dim": args.img_dim,
"use_label_smoothing": args.use_label_smoothing,
"label_flipping": args.label_flipping,
"patch_size": args.patch_size,
"use_mbd": args.use_mbd
}
# Launch training
launch_training(**d_params)
Jetez un œil au modèle. Générateur. Il est devenu u-net par rapport à DCGAN.
models.py
def generator_unet_upsampling(img_dim, bn_mode, model_name="generator_unet_upsampling"):
nb_filters = 64
if K.image_dim_ordering() == "th":
bn_axis = 1
nb_channels = img_dim[0]
min_s = min(img_dim[1:])
else:
bn_axis = -1
nb_channels = img_dim[-1]
min_s = min(img_dim[:-1])
unet_input = Input(shape=img_dim, name="unet_input")
# Prepare encoder filters
nb_conv = int(np.floor(np.log(min_s) / np.log(2)))
list_nb_filters = [nb_filters * min(8, (2 ** i)) for i in range(nb_conv)]
# Encoder
list_encoder = [Convolution2D(list_nb_filters[0], 3, 3,
subsample=(2, 2), name="unet_conv2D_1", border_mode="same")(unet_input)]
for i, f in enumerate(list_nb_filters[1:]):
name = "unet_conv2D_%s" % (i + 2)
conv = conv_block_unet(list_encoder[-1], f, name, bn_mode, bn_axis)
list_encoder.append(conv)
# Prepare decoder filters
list_nb_filters = list_nb_filters[:-2][::-1]
if len(list_nb_filters) < nb_conv - 1:
list_nb_filters.append(nb_filters)
# Decoder
list_decoder = [up_conv_block_unet(list_encoder[-1], list_encoder[-2],
list_nb_filters[0], "unet_upconv2D_1", bn_mode, bn_axis, dropout=True)]
for i, f in enumerate(list_nb_filters[1:]):
name = "unet_upconv2D_%s" % (i + 2)
# Dropout only on first few layers
if i < 2:
d = True
else:
d = False
conv = up_conv_block_unet(list_decoder[-1], list_encoder[-(i + 3)], f, name, bn_mode, bn_axis, dropout=d)
list_decoder.append(conv)
x = Activation("relu")(list_decoder[-1])
x = UpSampling2D(size=(2, 2))(x)
x = Convolution2D(nb_channels, 3, 3, name="last_conv", border_mode="same")(x)
x = Activation("tanh")(x)
generator_unet = Model(input=[unet_input], output=[x])
return generator_unet
Discriminateur.
models.py
def DCGAN_discriminator(img_dim, nb_patch, bn_mode, model_name="DCGAN_discriminator", use_mbd=True):
"""
Discriminator model of the DCGAN
args : img_dim (tuple of int) num_chan, height, width
pretr_weights_file (str) file holding pre trained weights
returns : model (keras NN) the Neural Net model
"""
list_input = [Input(shape=img_dim, name="disc_input_%s" % i) for i in range(nb_patch)]
if K.image_dim_ordering() == "th":
bn_axis = 1
else:
bn_axis = -1
nb_filters = 64
nb_conv = int(np.floor(np.log(img_dim[1]) / np.log(2)))
list_filters = [nb_filters * min(8, (2 ** i)) for i in range(nb_conv)]
# First conv
x_input = Input(shape=img_dim, name="discriminator_input")
x = Convolution2D(list_filters[0], 3, 3, subsample=(2, 2), name="disc_conv2d_1", border_mode="same")(x_input)
x = BatchNormalization(mode=bn_mode, axis=bn_axis)(x)
x = LeakyReLU(0.2)(x)
# Next convs
for i, f in enumerate(list_filters[1:]):
name = "disc_conv2d_%s" % (i + 2)
x = Convolution2D(f, 3, 3, subsample=(2, 2), name=name, border_mode="same")(x)
x = BatchNormalization(mode=bn_mode, axis=bn_axis)(x)
x = LeakyReLU(0.2)(x)
x_flat = Flatten()(x)
x = Dense(2, activation='softmax', name="disc_dense")(x_flat)
PatchGAN = Model(input=[x_input], output=[x, x_flat], name="PatchGAN")
print("PatchGAN summary")
PatchGAN.summary()
x = [PatchGAN(patch)[0] for patch in list_input]
x_mbd = [PatchGAN(patch)[1] for patch in list_input]
if len(x) > 1:
x = merge(x, mode="concat", name="merge_feat")
else:
x = x[0]
if use_mbd:
if len(x_mbd) > 1:
x_mbd = merge(x_mbd, mode="concat", name="merge_feat_mbd")
else:
x_mbd = x_mbd[0]
num_kernels = 100
dim_per_kernel = 5
M = Dense(num_kernels * dim_per_kernel, bias=False, activation=None)
MBD = Lambda(minb_disc, output_shape=lambda_output)
x_mbd = M(x_mbd)
x_mbd = Reshape((num_kernels, dim_per_kernel))(x_mbd)
x_mbd = MBD(x_mbd)
x = merge([x, x_mbd], mode='concat')
x_out = Dense(2, activation="softmax", name="disc_output")(x)
discriminator_model = Model(input=list_input, output=[x_out], name=model_name)
return discriminator_model
Combinaison de deux modèles.
models.py
def DCGAN(generator, discriminator_model, img_dim, patch_size, image_dim_ordering):
gen_input = Input(shape=img_dim, name="DCGAN_input")
generated_image = generator(gen_input)
if image_dim_ordering == "th":
h, w = img_dim[1:]
else:
h, w = img_dim[:-1]
ph, pw = patch_size
list_row_idx = [(i * ph, (i + 1) * ph) for i in range(h / ph)]
list_col_idx = [(i * pw, (i + 1) * pw) for i in range(w / pw)]
list_gen_patch = []
for row_idx in list_row_idx:
for col_idx in list_col_idx:
if image_dim_ordering == "tf":
x_patch = Lambda(lambda z: z[:, row_idx[0]:row_idx[1], col_idx[0]:col_idx[1], :])(generated_image)
else:
x_patch = Lambda(lambda z: z[:, :, row_idx[0]:row_idx[1], col_idx[0]:col_idx[1]])(generated_image)
list_gen_patch.append(x_patch)
DCGAN_output = discriminator_model(list_gen_patch)
DCGAN = Model(input=[gen_input],
output=[generated_image, DCGAN_output],
name="DCGAN")
return DCGAN
Charge pour appeler depuis main.py.
models.py
def load(model_name, img_dim, nb_patch, bn_mode, use_mbd, batch_size):
if model_name == "generator_unet_upsampling":
model = generator_unet_upsampling(img_dim, bn_mode, model_name=model_name)
print model.summary()
from keras.utils.visualize_util import plot
plot(model, to_file='../../figures/%s.png' % model_name, show_shapes=True, show_layer_names=True)
return model
if model_name == "generator_unet_deconv":
model = generator_unet_deconv(img_dim, bn_mode, batch_size, model_name=model_name)
print model.summary()
from keras.utils.visualize_util import plot
plot(model, to_file='../../figures/%s.png' % model_name, show_shapes=True, show_layer_names=True)
return model
if model_name == "DCGAN_discriminator":
model = DCGAN_discriminator(img_dim, nb_patch, bn_mode, model_name=model_name, use_mbd=use_mbd)
model.summary()
from keras.utils.visualize_util import plot
plot(model, to_file='../../figures/%s.png' % model_name, show_shapes=True, show_layer_names=True)
return model
if __name__ == '__main__':
# load("generator_unet_deconv", (256, 256, 3), 16, 2, False, 32)
load("generator_unet_upsampling", (256, 256, 3), 16, 2, False, 32)
Combinez les deux. DCGAN_model = models.DCGAN(generator_model, discriminator_model, img_dim, patch_size, image_dim_ordering) Apprenez les discriminateurs. disc_loss = discriminator_model.train_on_batch(X_disc, y_disc) Apprenez un modèle qui combine deux. gen_loss = DCGAN_model.train_on_batch(X_gen, [X_gen_target, y_gen])
train.py
import os
import sys
import time
import numpy as np
import models
from keras.utils import generic_utils
from keras.optimizers import Adam, SGD
import keras.backend as K
# Utils
sys.path.append("../utils")
import general_utils
import data_utils
def l1_loss(y_true, y_pred):
return K.sum(K.abs(y_pred - y_true), axis=-1)
def train(**kwargs):
"""
Train model
Load the whole train data in memory for faster operations
args: **kwargs (dict) keyword arguments that specify the model hyperparameters
"""
# Roll out the parameters
batch_size = kwargs["batch_size"]
n_batch_per_epoch = kwargs["n_batch_per_epoch"]
nb_epoch = kwargs["nb_epoch"]
model_name = kwargs["model_name"]
generator = kwargs["generator"]
image_dim_ordering = kwargs["image_dim_ordering"]
img_dim = kwargs["img_dim"]
patch_size = kwargs["patch_size"]
bn_mode = kwargs["bn_mode"]
label_smoothing = kwargs["use_label_smoothing"]
label_flipping = kwargs["label_flipping"]
dset = kwargs["dset"]
use_mbd = kwargs["use_mbd"]
epoch_size = n_batch_per_epoch * batch_size
# Setup environment (logging directory etc)
general_utils.setup_logging(model_name)
# Load and rescale data
X_full_train, X_sketch_train, X_full_val, X_sketch_val = data_utils.load_data(dset, image_dim_ordering)
img_dim = X_full_train.shape[-3:]
# Get the number of non overlapping patch and the size of input image to the discriminator
nb_patch, img_dim_disc = data_utils.get_nb_patch(img_dim, patch_size, image_dim_ordering)
try:
# Create optimizers
opt_dcgan = Adam(lr=1E-3, beta_1=0.9, beta_2=0.999, epsilon=1e-08)
# opt_discriminator = SGD(lr=1E-3, momentum=0.9, nesterov=True)
opt_discriminator = Adam(lr=1E-3, beta_1=0.9, beta_2=0.999, epsilon=1e-08)
# Load generator model
generator_model = models.load("generator_unet_%s" % generator,
img_dim,
nb_patch,
bn_mode,
use_mbd,
batch_size)
# Load discriminator model
discriminator_model = models.load("DCGAN_discriminator",
img_dim_disc,
nb_patch,
bn_mode,
use_mbd,
batch_size)
generator_model.compile(loss='mae', optimizer=opt_discriminator)
discriminator_model.trainable = False
DCGAN_model = models.DCGAN(generator_model,
discriminator_model,
img_dim,
patch_size,
image_dim_ordering)
loss = [l1_loss, 'binary_crossentropy']
loss_weights = [1E1, 1]
DCGAN_model.compile(loss=loss, loss_weights=loss_weights, optimizer=opt_dcgan)
discriminator_model.trainable = True
discriminator_model.compile(loss='binary_crossentropy', optimizer=opt_discriminator)
gen_loss = 100
disc_loss = 100
# Start training
print("Start training")
for e in range(nb_epoch):
# Initialize progbar and batch counter
progbar = generic_utils.Progbar(epoch_size)
batch_counter = 1
start = time.time()
for X_full_batch, X_sketch_batch in data_utils.gen_batch(X_full_train, X_sketch_train, batch_size):
# Create a batch to feed the discriminator model
X_disc, y_disc = data_utils.get_disc_batch(X_full_batch,
X_sketch_batch,
generator_model,
batch_counter,
patch_size,
image_dim_ordering,
label_smoothing=label_smoothing,
label_flipping=label_flipping)
# Update the discriminator
disc_loss = discriminator_model.train_on_batch(X_disc, y_disc)
# Create a batch to feed the generator model
X_gen_target, X_gen = next(data_utils.gen_batch(X_full_train, X_sketch_train, batch_size))
y_gen = np.zeros((X_gen.shape[0], 2), dtype=np.uint8)
y_gen[:, 1] = 1
# Freeze the discriminator
discriminator_model.trainable = False
gen_loss = DCGAN_model.train_on_batch(X_gen, [X_gen_target, y_gen])
# Unfreeze the discriminator
discriminator_model.trainable = True
batch_counter += 1
progbar.add(batch_size, values=[("D logloss", disc_loss),
("G tot", gen_loss[0]),
("G L1", gen_loss[1]),
("G logloss", gen_loss[2])])
# Save images for visualization
if batch_counter % (n_batch_per_epoch / 2) == 0:
# Get new images from validation
data_utils.plot_generated_batch(X_full_batch, X_sketch_batch, generator_model,
batch_size, image_dim_ordering, "training")
X_full_batch, X_sketch_batch = next(data_utils.gen_batch(X_full_val, X_sketch_val, batch_size))
data_utils.plot_generated_batch(X_full_batch, X_sketch_batch, generator_model,
batch_size, image_dim_ordering, "validation")
if batch_counter >= n_batch_per_epoch:
break
print("")
print('Epoch %s/%s, Time: %s' % (e + 1, nb_epoch, time.time() - start))
if e % 5 == 0:
gen_weights_path = os.path.join('../../models/%s/gen_weights_epoch%s.h5' % (model_name, e))
generator_model.save_weights(gen_weights_path, overwrite=True)
disc_weights_path = os.path.join('../../models/%s/disc_weights_epoch%s.h5' % (model_name, e))
discriminator_model.save_weights(disc_weights_path, overwrite=True)
DCGAN_weights_path = os.path.join('../../models/%s/DCGAN_weights_epoch%s.h5' % (model_name, e))
DCGAN_model.save_weights(DCGAN_weights_path, overwrite=True)
except KeyboardInterrupt:
pass
L'endroit pour obtenir les données est converti en hdf5.
data_utils.py
code de chaîne
https://github.com/pfnet-research/chainer-pix2pix
git clone https://github.com/pfnet-research/chainer-pix2pix.git
cd chainer-pix2pix
Supprimez l'ensemble de données et effectuez la formation
python train_facade.py -g 0 -i CMP_facade_DB_base/base --out image_out --snapshot_interval 10000
Charger le modèle entraîné et régler
python train_facade.py -g 0 -i CMP_facade_DB_base/base --out image_out --snapshot_interval 10000 -r image_out/snapshot_iter_30000.npz
Recommended Posts